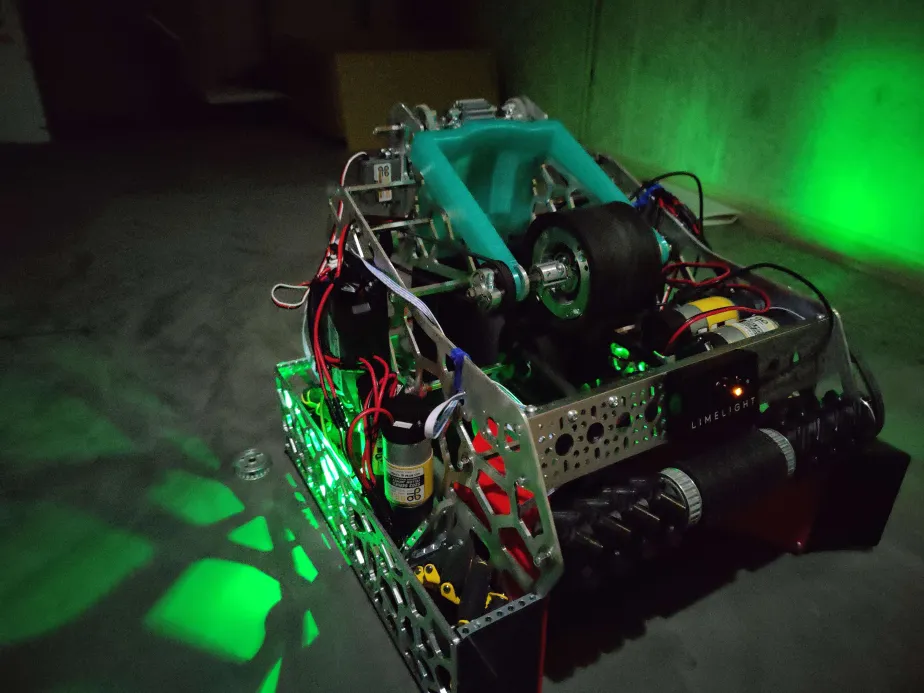
Robot Overview - V3 VectTurrAir
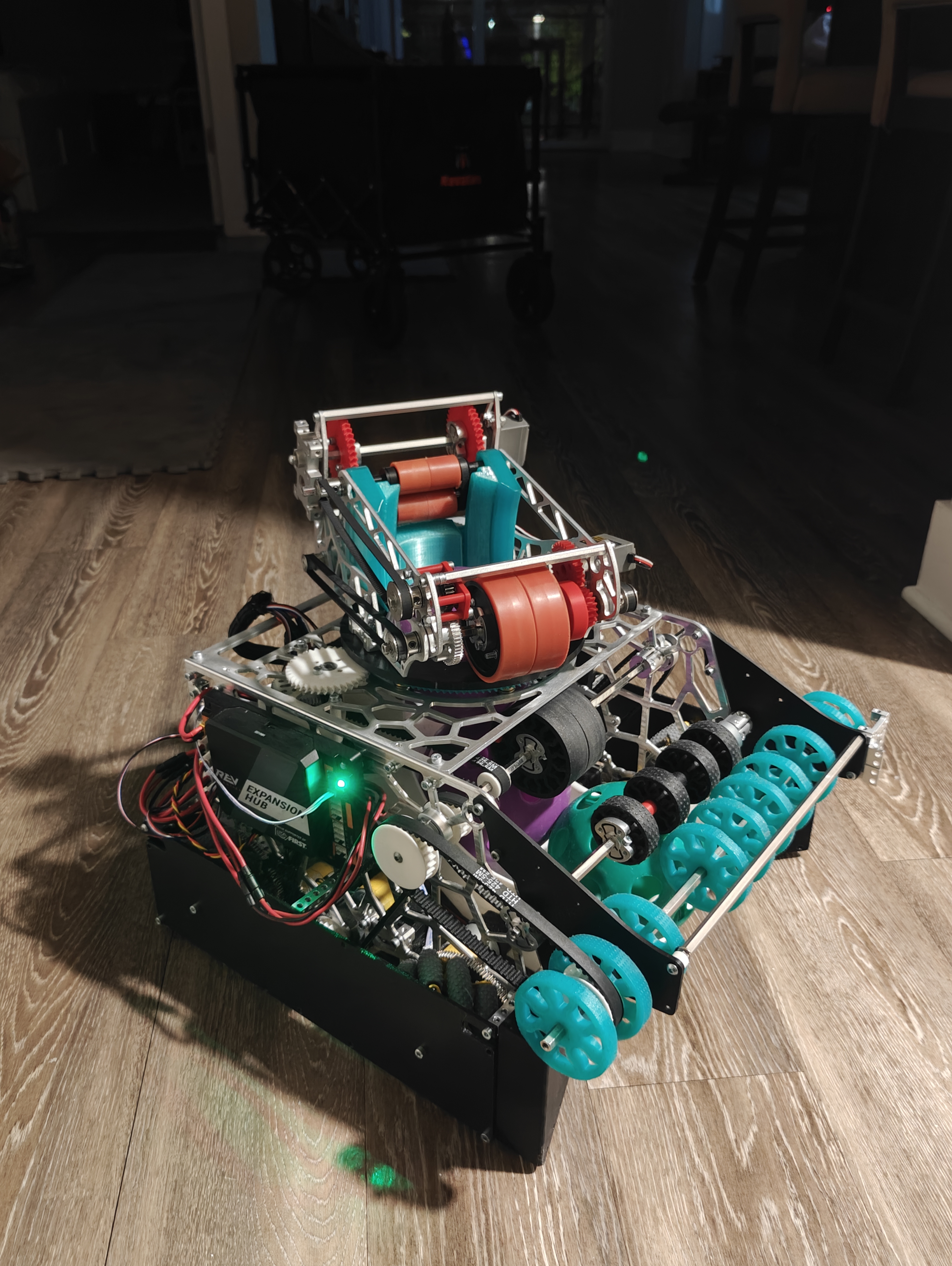
For the final stages of our rookie FTC season, Team #30686 Electrolights completely rebuilt our mechanical platform into the V3 VectTurrAir. Reflecting advanced engineering techniques, our rebuild centers on a servo mode bearing stack turret, a powered counter-roller launcher, and a highly specialized gear drivetrain, maximizing agility and goal tracking.
The V3 rebuild features a 24- Artifact Autonomous powered by a sortless passthrough design that provides consistent transfer between our 16-inch custom molded intake and the scoring launcher. Our launch system uses dual counterrollers to eliminate backspin, bringing it to near zero to guarantee extremely accurate and repeatable trajectory arcs.
.png)
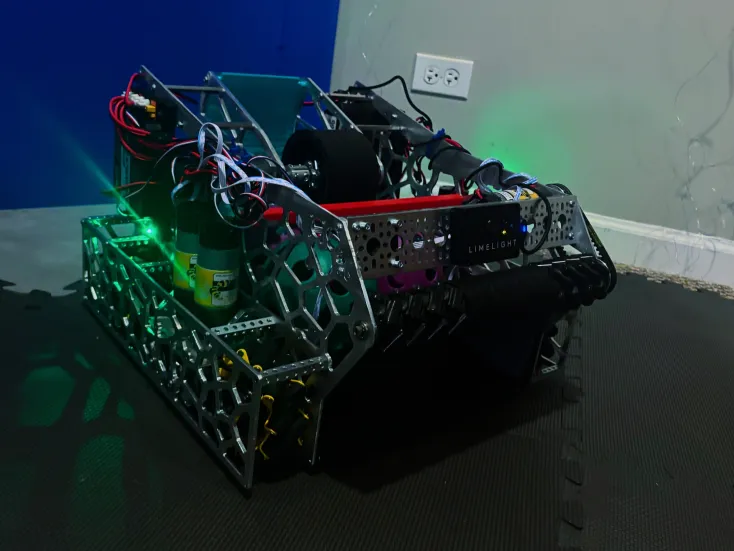
Robot Demonstration
Rebuild Subsystems
Bearing Stack Turret
Designed around a high-precision bearing stack, our turret enables continuous rotational target tracking. This allows the robot to lock on to goals and score while traversing the field in any direction, reducing overall cycle times.
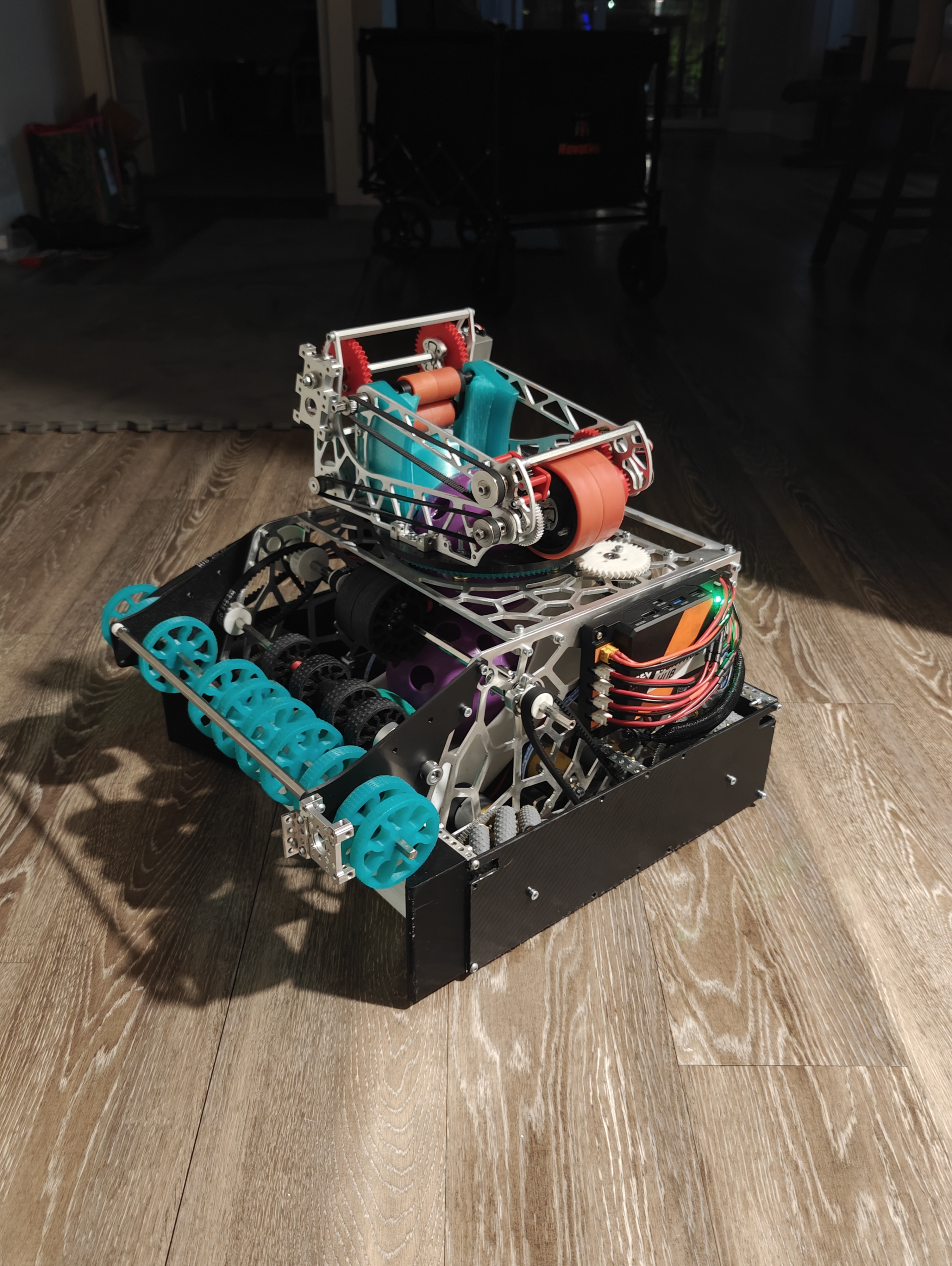
Dual Counterroller Launcher
To solve accuracy issues caused by erratic spin, we developed a shooter with two counter-rotating rollers. By bringing backspin close to zero, the flight trajectory remains perfectly consistent across various distances and reduces bounceouts from the goal.
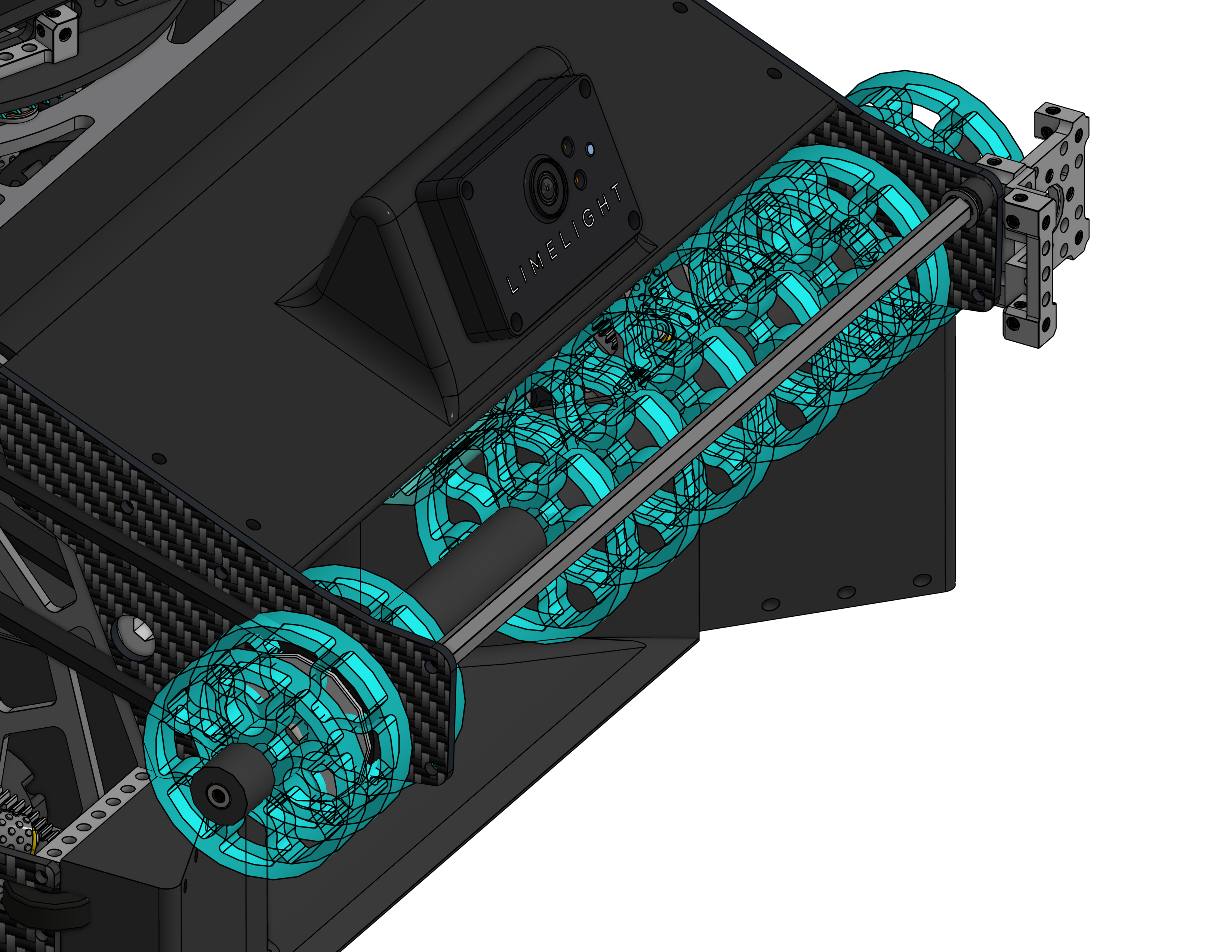
Custom Molded Wedge Intake
Contrary to our V2 design, we switched to a custom molded silicone 65mm intake wheels with wedges that allow us to sidespike in 0.3 seconds and intake a lot faster. We however retained the same transfer system as our V2 retaining our 0.12 second rapid fire.
Technical Specifications
| Parameter | V3 VectTurrAir Specification | Function & Competitive Advantage |
|---|---|---|
| Drivetrain | Precision Gear Drivetrain | Direct torque transfer for responsive mecanum maneuvering |
| Turret System | Continuous Bearing Stack Turret | Locks shooter onto goal coordinates while driving |
| Autonomous | 24-Ball Autonomous Routine | Odometry driven navigation with Pedro Pathing for high scores. |
| Launcher | Dual Counterroller Design | Zeroes backspin to provide consistent, repeatable shots. |
| Passthrough | Sortless Passthrough (Transfer Design) | Bypasses indexer jams with smooth, direct-to-wheel feeding. |
| Acquisition | 16" Custom Silicone Intake with 0.3s Sidespike | Allows us to intake 3 artifacts wide near instantly. |
Design Evolution
Spindexer Bot (Vector)
Our initial competition build featured a rotary spindexer hopper design. While promising in concept, it suffered from severe jamming and feed-rate issues under match conditions. We quickly realized the spindexer mechanism was too complex and prone to friction, forcing a shift in architecture.
Sortless Passthrough (VectAir)
The VectAir introduced a sortless passthrough transfer system coupled with an "Airsort" hood. By changing the hood angle midair, we could sort elements on the fly. It featured a rapid-fire rate of 0.12 seconds, a 21-ball autonomous sequence, and a 16-inch wide vectored silicone intake with a 0.4s sidespike.
Turret & Gear Rebuild (VectTurrAir) - Current Bot
Combining the successful sortless passthrough of V2 with advanced mechanical upgrades, VectTurrAir is our current robot. Upgrades include a continuous bearing stack turret, a reliable gear drivetrain, an optimized 24-ball autonomous, and the dual counterroller shooter that eliminates ball backspin for high accuracy from far.